My Projects
-
ROS 2, C++, Optimal Control

Quadruped Crowd Navigation
-
ROS 2, C++, Trajectory Generation

Low Level Quadruped Gait
-
ROS 2, Computer Vision, MoveIt
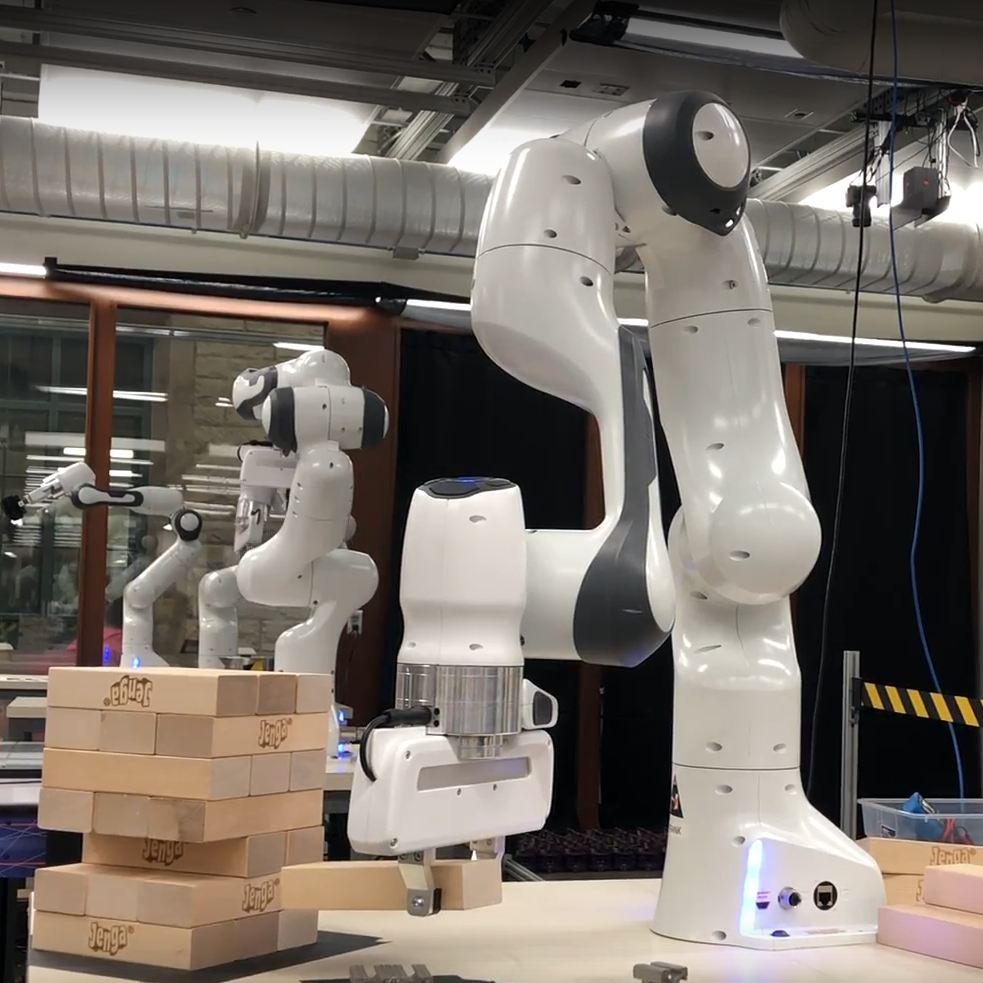
Robot Jenga Assistant
-
Unitree, strace, GDB

Hacking Unitree Cameras
-
C++, Git

Intern at Boston Dynamics
-
ROS 2, C++, SLAM

EKF SLAM on a Turtlebot3
-
Microcontrollers, C
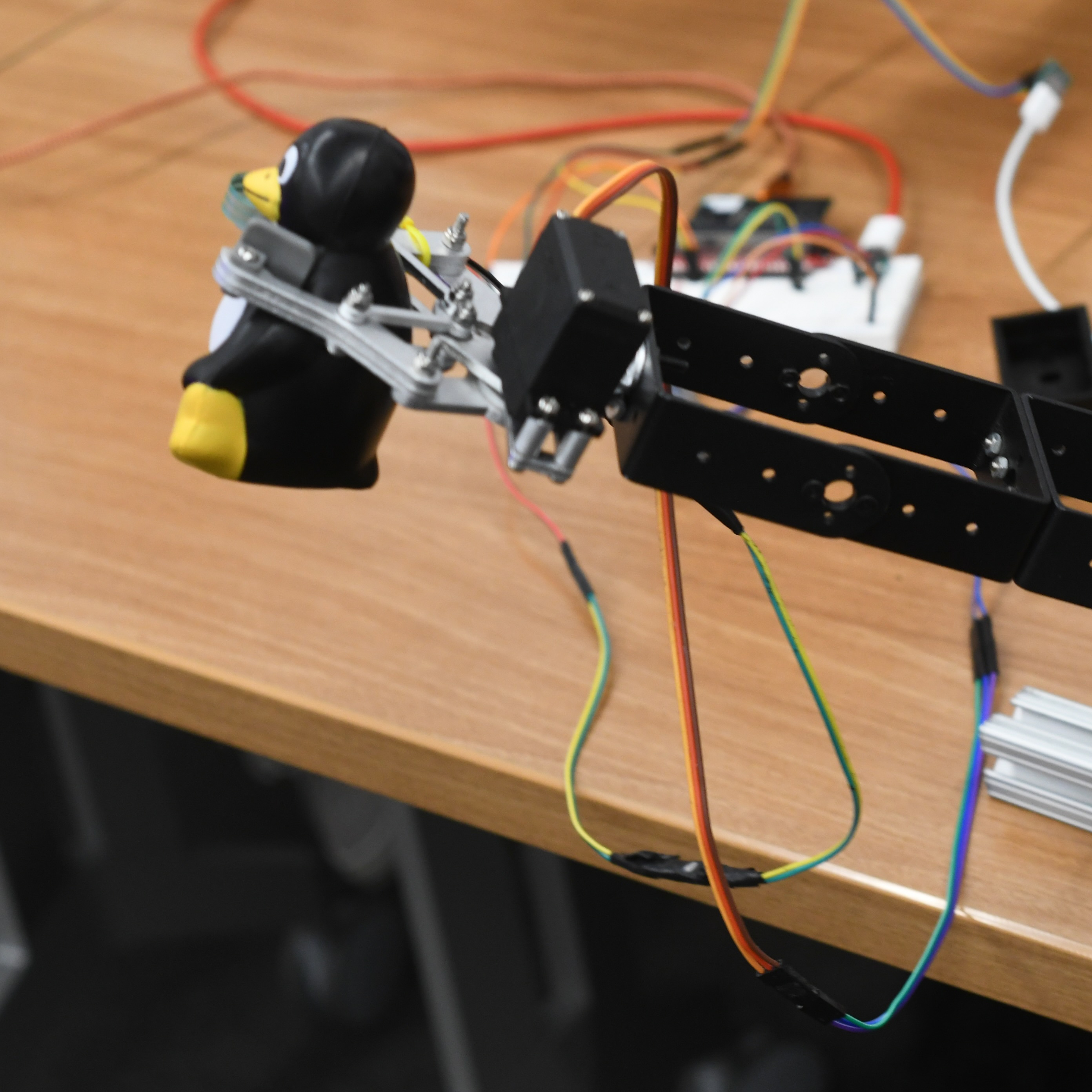
EMG Powered Gripper
-
Particle Physics, Electronics
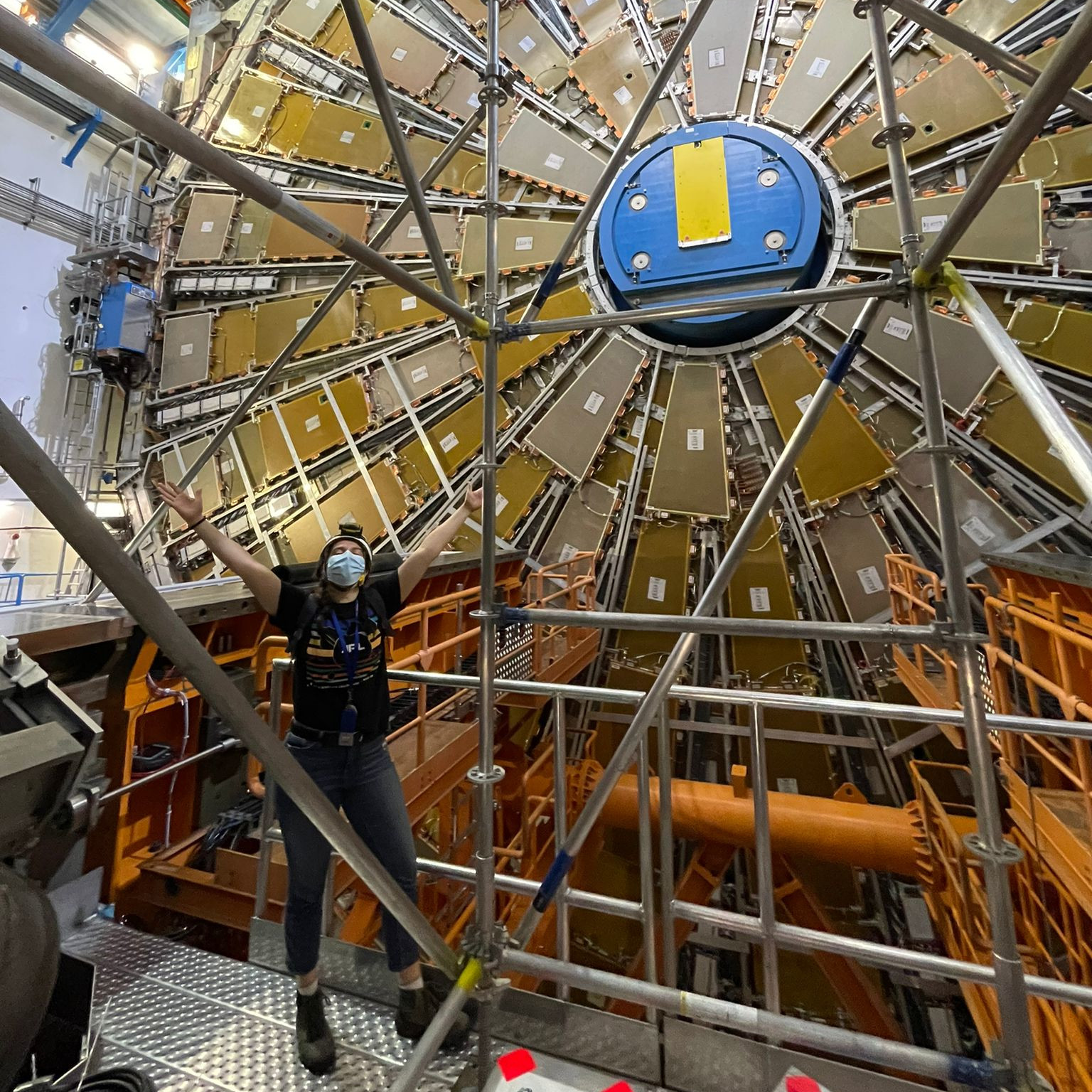
Technician at CERN
-
YouBot, CoppeliaSim, PI Control
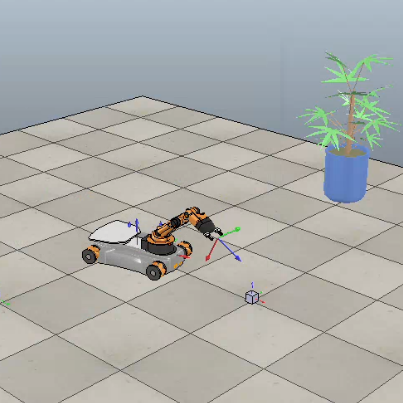
Mobile Manipulator Simulation
-
Dynamics, Simulation, Python
Plinko Simulation
-
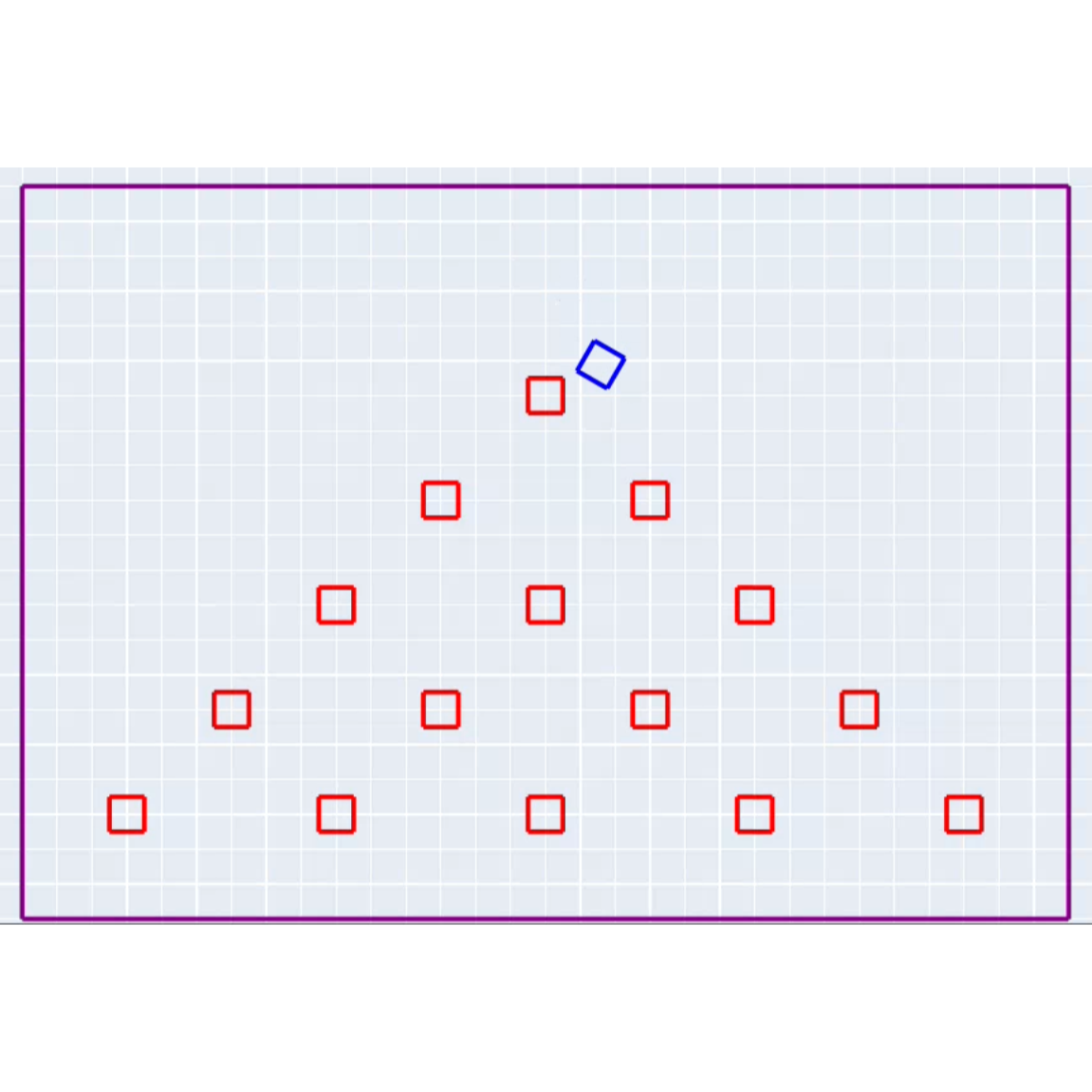
Computer Vision, Python
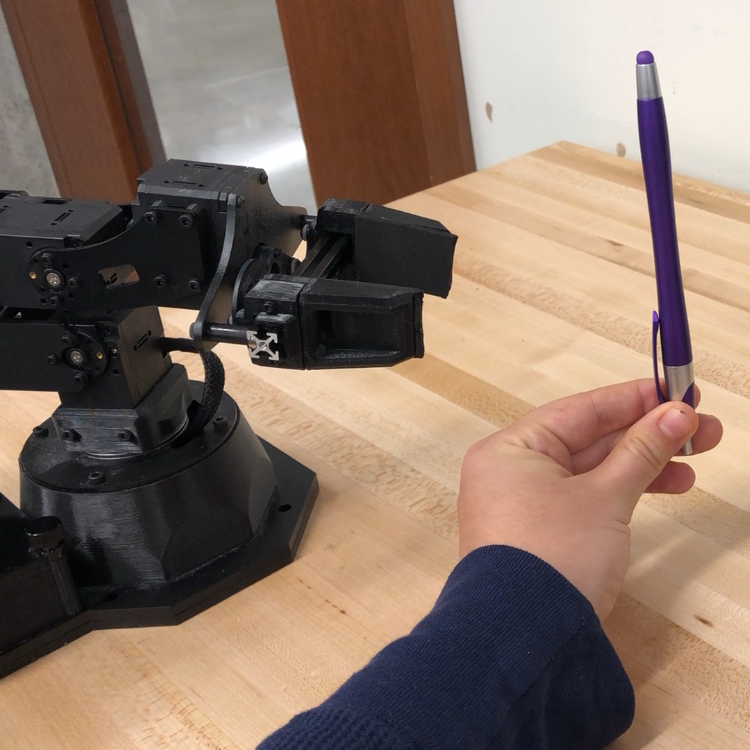
Robot Pen Thief
About me!